Problem solving and knowledge formation are at the center of our theory. The manager’s fundamental knowledge-based objective is to sustain above-normal profits by continually discovering new knowledge or new solutions that form from unique combinations of existing knowledge. Nelson and Winter (1982) explicitly define a firm’s knowledge (or capability) as the “inputoutput combinations achievable with all possible mixes and levels of activities known to the firm” (pp. 63-64). In this literature, the state of a firm’s knowledge can be advanced by either absorbing existing knowledge external to the firm or by developing new knowledge by first identifying a problem and then discovering a valuable new solution. Therefore, if a firm is to develop unique knowledge or a unique new capability through any manner other than luck, it must identify a valuable problem and conduct an efficient solution search. Valuable solutions deliver value to the firm, either through enhancement or development of a product or service or by reducing the cost of production or delivery.
In our theory, managers choose problems while iden- tifying knowledge sets or existing technology either within or outside the firm that are potentially useful in searching for solutions to that problem (Nelson and Winter 1982). The choice of problems reflects an assessment of the expected value of potential solutions and an assessment of the firm’s capacity to profitably reach high-value solutions. A firm’s reservoir of knowledge sets and prior experience informs this choice. In choosing problems, managers in essence choose an unknown set of potential solutions, but once a problem is chosen, the task becomes identifying relevant knowledge and then maximizing the probability of discovering a high-value solution. This is achieved by choosing organizational mechanisms that efficiently govern search. To optimally organize search first necessitates an understanding of the solution space under exploration.
1. Dimensionalizing Solution Landscapes
Our conceptualization of problems and solution search stems from Simon’s (1962) work on complex systems and Kauffman’s (1993) broad work on NK modeling. Simon (1962) conceptualized a complex system as one “made up of a large number of parts that interact in a nonsimple way” (p. 486). Complex problems represent complex systems in which the value of recombinations of existing technology represents solutions (Fleming 2001, Schumpeter 1939, Henderson and Clark 1990, Weitzman 1996, Fleming and Sorenson 2000). Thus, as Fleming and Sorenson (2000) argue, the invention of the automobile combined technology from “the bicycle, the horse carriage, and the internal combustion engine,” while the microprocessor combined knowledge “of a computer’s central processing unit with integrated circuit fabrication processes.” Continuing with Simon’s logic, the complexity of a problem is a function of the degree to which the individual design choices, which define a solution, are either independent or interdependent in their contribution to solution value.
We conceptualize this level of interaction using Kauffman’s NK modeling. This modeling approach has been used extensively in recent years as a simple mathematical construction of the interaction of elements within systems of varying complexity. In these models N represents the number of parts of the system (in our case, design choices) and K, which ranges from zero to one, represents the degree of interaction among the parts (or design choices). These two parameters then combine to describe landscapes that are either rugged, reflecting a high degree of interaction, or smooth, representing a low level of interaction.
Thus, suppose we identify that a particular problem may benefit from five distinct knowledge sets, with each knowledge set informing a distinct binary design choice. Each unique combination of these design choices yields a distinct solution value. The level of interaction among these binary design choices defines the topography of a solution landscape. The greater this interaction, the more rugged the landscape is, the higher the value of the highest valued solutions is, and the lower the spatial autocorrelation among high-value solutions is. The lower the interaction is, the smoother the landscape (and the lower the value of the highest solution).
For any given problem, the set of all possible com- binations of relevant existing knowledge (i.e., solutions) can be represented as a landscape the topography of which defines the value associated with any given combination. Peaks on such solution landscapes represent valuable combinations of knowledge sets or technologies that are highly complementary. Valleys on such landscapes represent low-value combinations of existing knowledge. When knowledge sets are highly interdependent, solution landscapes are more rugged and unpredictable (Fleming and Sorenson 2000). Under these conditions, the value of the global maximum rises, but the average height of peaks declines. On these more rugged landscapes, a series of incremental changes in design is unlikely to lead to the discovery of highly valuable solutions (Fleming and Sorenson 2000).
Problems and their corresponding solution landscapes thus can be arrayed according to the level of interaction among knowledge sets. Borrowing from Simon’s typology of complex systems, we provide an analogous typology of problems—decomposable or low-interaction problems, nondecomposable or high-interaction problems, and nearly decomposable problems with moderate levels of knowledge interaction.1
Low-interaction/decomposable problems are problems in which the value of solutions depends very little on the interactions among knowledge sets and design choices. With such problems, groups of individuals possessing rather distinct knowledge sets can independently apply their knowledge to unique design choices with a reasonable expectation that the aggregation of their independent efforts, along with the independent efforts of others with distinctly different knowledge sets, will uncover valuable problem solutions. For instance, the problem of discovering a higher- performing desktop personal computer is currently a rather low-interaction problem in knowledge formation. Within a certain range, computer performance can be increased by actors independently improving any number of subsystems (e.g., disk drive, monitor, Ethernet card) or components (e.g., microprocessor, memory). To use Simon’s language, low-interaction problems are “decomposable” in the sense that these problems can be subdivided into subproblems, each of which draws from rather specialized knowledge sets. Those possessing knowledge set A can independently address the subproblem of selecting from among choices while those possessing knowledge set B can independently address the problem of optimizing among bi, where A ∩ B ={Φ} . In Kauffman’s NK model, such low-interaction problems correspond to gradual and relatively smooth variations in solution landscapes with few peaks and high spatial autocorrelation, implying that high-value solutions tend to cluster in the same region.
High-interaction problems, by contrast, have solution landscapes in which the value of solutions depends on interactions among design choices. For instance, consider one of the subproblems above, designing a leading- edge microprocessor. To design and build a leading- edge microprocessor circuit demands numerous knowledge sets that extensively interact in determining the value of solutions (Macher 2001). With such highinteraction problems, an actor familiar with a particular technology cannot predictably enhance the value of the product design based solely on the knowledge he or she possesses. In this case, the value of any particular design change will interact with a host of other potential design changes determined by actors possessing distinctly different knowledge sets. In Kauffman’s NK logic, the more extensive the interactions among knowledge sets are, the more rugged the landscape with abruptly jagged peaks and valleys. With high- interaction problems, knowledge sets cannot be separated into subproblems. Interactions among distinct knowledge sets are so extensive that any attempt to define subproblems and discover corresponding subordinate solutions offers no predictable improvement over randomly selecting trials. In Simon’s language such problems are nondecomposable.
Moderate-interaction problems are problems that, in Simon’s language, are nearly decomposable. The level of interaction among design choices is intermediate in the sense that subproblems associated with distinctive knowledge sets can be defined, but the value of a design choice within one subproblem is not fully independent of the design choices made in another subproblem. Thus, interactions among knowledge sets are not trivial. Nonetheless, near decomposability implies that interactions among knowledge sets within subproblems are greater than among subproblems.2
Staying with our computer illustration, the problem of enhancing the performance of notebook computers is generally regarded as a problem involving significantly more interdependence among design choices than the problem of refining desktop systems (Hoetker 2003). While the overall problem can clearly be separated into subproblems associated with designing the screen, key- board, motherboard, etc., there are significant tradeoffs and interdependencies in design choices for these components as they relate to performance dimensions of weight, size, and battery life (Hoetker 2003). Thus, the design of a leading- edge notebook computer is currently a nearly decomposable problem in the sense that nontrivial interactions exist among the knowledge sets that support subproblems, but these are significantly less than the interactions among knowledge sets applicable within subproblems. In such cases, Kauffman’s NK model yields intermediate levels of ruggedness with such an intermediate level of interaction among knowledge sets.
2. Efficiently Searching Solution Landscapes
The search for solutions is necessarily uncertain. The likelihood, speed, and cost of arriving at a valuable solution therefore depend both on luck and on the pattern of trials that actors undertake (Simon 1962), with each trial reflecting a unique combination of knowledge or a unique set of design choices. If trials are chosen randomly, the probability of arriving at a valuable solution to a complex, high-interaction problem is very low. More efficient orderings utilize knowledge to direct this search process. There are two fundamental sources of such knowledge that correspond to two distinct approaches to search: directional and heuristic.3
Directional or local search4 is search guided solely by feedback or experience from prior trials. New combinations of knowledge are pursued by altering one design element at a time (Gavetti and Levinthal 2000), observing the resulting change in solution value, and then either continuing with the same path of search or—in the wake of declining performance—restoring the design to its original form and adjusting a different element. The key feature of this form of search is that independent actors, either individuals or groups, independently pursue trials and independently observe performance. This form of experiential search or search through trial and error has been described in a wide range of literature (March and Simon 1958, Cyert and March 1963, Nelson and Winter 1982).
Directional search is well suited to low-interaction problems—problems where there is little interaction among design choices in defining solution performance. On such solution landscapes, the only relevant feedback is whether performance is increasing or declining in response to a specific design change. Thus, searching for solutions to such problems is a fully decomposable activity.
Directional search is, of course, quite inefficient when exploring solutions to high-interaction problems. Design choices here are highly interdependent. The rugged, multipeaked topography of complex solution landscapes ensures that directional search through independent design adjustments is unlikely to discover a valuable peak. Indeed, on this rugged terrain, small changes in design may result in substantial shifts in solution value. Thus, the efficacy of directional search diminishes as problems become less decomposable and knowledge interactions increase.
Heuristic or cognitive search is a form of solution search in which an actor or a group of actors cognitively evaluate the probable consequences of design choices rather than relying solely on feedback after design choices are made (Simon 1991, March and Simon 1958). Trials are thus selected based on a cognitive map or implicit theory of how knowledge sets and specific design choices relevant to the problem interact to determine solution performance. These heuristics can be thought of as simplified representations of the solution landscapes or, as Gavetti and Levinthal describe, “cognitive representations… of lower dimensionality than the actual landscapes” (2000, p. 121). These “theory-driven structures” speed problem, solving by “furnishing a basis for evaluating information” (Walsh 1995). These cognitive representations of the solution landscape are then used to select trials that maximize the probability of quickly discovering a high-value solution. Of course, cognitive maps are not static. As trials are undertaken and knowledge is gleaned through feedback, managers update their heuristics.
Heuristics can be of two essential forms, based either on a single individual’s beliefs and cognitions or on a group’s collective beliefs. If each actor possessed unlimited cognitive capacity, then each actor could quickly absorb all relevant knowledge, develop theories about the structure of interactions, and choose an optimal pattern of search. However, human minds are limited in the rate at which knowledge can be assimilated, accumulated, and applied (Simon 1945, pp. 40-41). Hence, distinct knowledge sets needed for solving complex problems are likely to be widely dispersed and reside in the minds of many agents who have specialized in unique knowledge, which is why we focus our attention on groups of actors engaged in heuristic search.
Thus, consider three actors with different and distinct knowledge sets, all of which are relevant to a particular problem. Assume that these knowledge sets reflect a set of design choices that define a solution landscape to a particular problem and that the landscape is at least somewhat rugged. Each actor can independently develop an ordering for trials based on his or her respective knowledge. However, differences in knowledge are likely to yield differences in cognitive maps and hence the recommended order of trials. Moreover, absent knowledge sharing, these independently developed cognitive maps are unlikely to be well matched to the topography of the solution landscapes. Only by developing heuristics that encompass the knowledge of all actors can the probability of discovering highly valued solutions be enhanced.
While individual beliefs are the basis of heuristics that guide group decisions, developing group heuristics requires the resolution of inherent conflicts in beliefs (Walsh and Fahey 1986, Fiol 1994). These group heuristics are negotiated beliefs that are shaped not only by the quality of actors’ logic, but also by each actor’s selfinterest and political position (Walsh and Fahey 1986). Thus, while individual beliefs form the basis of group beliefs or heuristics, not all individual beliefs are equally important or influential in this process.
Heuristic search first necessitates knowledge transfer to facilitate the development of heuristics that derive from multiple and dispersed knowledge sets. Knowledge transfer in turn necessitates the development of a shared language to support it. Finally, the development of group heuristics requires the reconciliation of the divergent beliefs about the proper shape of the search heuristic. By contrast, directional search requires little more than choosing an initial set of design choices and allowing each agent to independently choose trials.
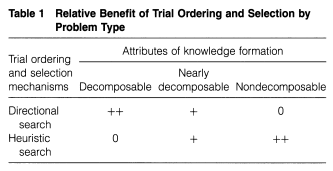
These two search processes are easily matched to problem types. Heuristic search is necessary when problems are complex, with high levels of interaction among knowledge sets and design choices. Directional search is warranted when problems are decomposable, involving limited knowledge interaction because heuristics offer no clear benefit in this setting. Nearly decomposable, moderate- interaction problems benefit from both directional and heuristic search: Heuristic search essentially defines the area of the solution landscape where directional search will take place. Thus, as problems become more complex and solution landscapes more rugged, efficient search necessitates extensive knowledge exchange to craft search heuristics. However, because these intermediately complex problems yield landscapes with significant autocorrelation and thus locational clustering of high-value solutions, directional search in regions targeted by cognitive maps may prove particularly fruitful. Cognitive maps in this setting aid in discovering regions of the solution landscape particularly attractive for search, while directional search involving independent actors effectively explores these regions. Table 1 summarizes the relationship between problem type and the relative benefit of directional and heuristic search.
Source: Nickerson Jack A., Zenger Todd R. (2004), “A Knowledge-Based Theory of the Firm: The Problem-Solving Perspective”, Organization Science, Vol. 15, No. 6 (Nov. – Dec., 2004), pp. 617-632, http://www.jstor.org/stable/30034765.