Developed by Norwegian mathematician Marius Spohus Lie (1842-1899) and later adopted by modern economists, group theory is a method of analyzing invariant relationships among economic variables where often the relationships are represented by differential equation systems.
Source:
R Sato, Theory of Technical Change and Economic Invariance: Application of Lie Groups (New York, 1981)
Main classes of groups
The range of groups being considered has gradually expanded from finite permutation groups and special examples of matrix groups to abstract groups that may be specified through a presentation by generators and relations.
Permutation groups
The first class of groups to undergo a systematic study was permutation groups. Given any set X and a collection G of bijections of X into itself (known as permutations) that is closed under compositions and inverses, G is a group acting on X. If X consists of n elements and G consists of all permutations, G is the symmetric group Sn; in general, any permutation group G is a subgroup of the symmetric group of X. An early construction due to Cayley exhibited any group as a permutation group, acting on itself (X = G) by means of the left regular representation.
In many cases, the structure of a permutation group can be studied using the properties of its action on the corresponding set. For example, in this way one proves that for n ≥ 5, the alternating group An is simple, i.e. does not admit any proper normal subgroups. This fact plays a key role in the impossibility of solving a general algebraic equation of degree n ≥ 5 in radicals.
Matrix groups
The next important class of groups is given by matrix groups, or linear groups. Here G is a set consisting of invertible matrices of given order n over a field K that is closed under the products and inverses. Such a group acts on the n-dimensional vector space Kn by linear transformations. This action makes matrix groups conceptually similar to permutation groups, and the geometry of the action may be usefully exploited to establish properties of the group G.
Transformation groups
Permutation groups and matrix groups are special cases of transformation groups: groups that act on a certain space X preserving its inherent structure. In the case of permutation groups, X is a set; for matrix groups, X is a vector space. The concept of a transformation group is closely related with the concept of a symmetry group: transformation groups frequently consist of all transformations that preserve a certain structure.
The theory of transformation groups forms a bridge connecting group theory with differential geometry. A long line of research, originating with Lie and Klein, considers group actions on manifolds by homeomorphisms or diffeomorphisms. The groups themselves may be discrete or continuous.
Abstract groups
Most groups considered in the first stage of the development of group theory were “concrete”, having been realized through numbers, permutations, or matrices. It was not until the late nineteenth century that the idea of an abstract group as a set with operations satisfying a certain system of axioms began to take hold. A typical way of specifying an abstract group is through a presentation by generators and relations,
- {\displaystyle G=\langle S|R\rangle .}

A significant source of abstract groups is given by the construction of a factor group, or quotient group, G/H, of a group G by a normal subgroup H. Class groups of algebraic number fields were among the earliest examples of factor groups, of much interest in number theory. If a group G is a permutation group on a set X, the factor group G/H is no longer acting on X; but the idea of an abstract group permits one not to worry about this discrepancy.
The change of perspective from concrete to abstract groups makes it natural to consider properties of groups that are independent of a particular realization, or in modern language, invariant under isomorphism, as well as the classes of group with a given such property: finite groups, periodic groups, simple groups, solvable groups, and so on. Rather than exploring properties of an individual group, one seeks to establish results that apply to a whole class of groups. The new paradigm was of paramount importance for the development of mathematics: it foreshadowed the creation of abstract algebra in the works of Hilbert, Emil Artin, Emmy Noether, and mathematicians of their school.[citation needed]
Groups with additional structure
An important elaboration of the concept of a group occurs if G is endowed with additional structure, notably, of a topological space, differentiable manifold, or algebraic variety. If the group operations m (multiplication) and i (inversion),
- {\displaystyle m:G\times G\to G,(g,h)\mapsto gh,\quad i:G\to G,g\mapsto g^{-1},}

are compatible with this structure, that is, they are continuous, smooth or regular (in the sense of algebraic geometry) maps, then G is a topological group, a Lie group, or an algebraic group.[2]
The presence of extra structure relates these types of groups with other mathematical disciplines and means that more tools are available in their study. Topological groups form a natural domain for abstract harmonic analysis, whereas Lie groups (frequently realized as transformation groups) are the mainstays of differential geometry and unitary representation theory. Certain classification questions that cannot be solved in general can be approached and resolved for special subclasses of groups. Thus, compact connected Lie groups have been completely classified. There is a fruitful relation between infinite abstract groups and topological groups: whenever a group Γ can be realized as a lattice in a topological group G, the geometry and analysis pertaining to G yield important results about Γ. A comparatively recent trend in the theory of finite groups exploits their connections with compact topological groups (profinite groups): for example, a single p-adic analytic group G has a family of quotients which are finite p-groups of various orders, and properties of G translate into the properties of its finite quotients.
Branches of group theory
Finite group theory
During the twentieth century, mathematicians investigated some aspects of the theory of finite groups in great depth, especially the local theory of finite groups and the theory of solvable and nilpotent groups.[citation needed] As a consequence, the complete classification of finite simple groups was achieved, meaning that all those simple groups from which all finite groups can be built are now known.
During the second half of the twentieth century, mathematicians such as Chevalley and Steinberg also increased our understanding of finite analogs of classical groups, and other related groups. One such family of groups is the family of general linear groups over finite fields. Finite groups often occur when considering symmetry of mathematical or physical objects, when those objects admit just a finite number of structure-preserving transformations. The theory of Lie groups, which may be viewed as dealing with “continuous symmetry”, is strongly influenced by the associated Weyl groups. These are finite groups generated by reflections which act on a finite-dimensional Euclidean space. The properties of finite groups can thus play a role in subjects such as theoretical physics and chemistry.
Representation of groups
Saying that a group G acts on a set X means that every element of G defines a bijective map on the set X in a way compatible with the group structure. When X has more structure, it is useful to restrict this notion further: a representation of G on a vector space V is a group homomorphism:
- {\displaystyle \rho :G\to \operatorname {GL} (V),}

where GL(V) consists of the invertible linear transformations of V. In other words, to every group element g is assigned an automorphism ρ(g) such that ρ(g) ∘ ρ(h) = ρ(gh) for any h in G.
This definition can be understood in two directions, both of which give rise to whole new domains of mathematics.[3] On the one hand, it may yield new information about the group G: often, the group operation in G is abstractly given, but via ρ, it corresponds to the multiplication of matrices, which is very explicit.[4] On the other hand, given a well-understood group acting on a complicated object, this simplifies the study of the object in question. For example, if G is finite, it is known that V above decomposes into irreducible parts. These parts in turn are much more easily manageable than the whole V (via Schur’s lemma).
Given a group G, representation theory then asks what representations of G exist. There are several settings, and the employed methods and obtained results are rather different in every case: representation theory of finite groups and representations of Lie groups are two main subdomains of the theory. The totality of representations is governed by the group’s characters. For example, Fourier polynomials can be interpreted as the characters of U(1), the group of complex numbers of absolute value 1, acting on the L2-space of periodic functions.
Lie theory
A Lie group is a group that is also a differentiable manifold, with the property that the group operations are compatible with the smooth structure. Lie groups are named after Sophus Lie, who laid the foundations of the theory of continuous transformation groups. The term groupes de Lie first appeared in French in 1893 in the thesis of Lie’s student Arthur Tresse, page 3.[5]
Lie groups represent the best-developed theory of continuous symmetry of mathematical objects and structures, which makes them indispensable tools for many parts of contemporary mathematics, as well as for modern theoretical physics. They provide a natural framework for analysing the continuous symmetries of differential equations (differential Galois theory), in much the same way as permutation groups are used in Galois theory for analysing the discrete symmetries of algebraic equations. An extension of Galois theory to the case of continuous symmetry groups was one of Lie’s principal motivations.
Combinatorial and geometric group theory
Groups can be described in different ways. Finite groups can be described by writing down the group table consisting of all possible multiplications g • h. A more compact way of defining a group is by generators and relations, also called the presentation of a group. Given any set F of generators {\displaystyle \{g_{i}\}_{i\in I}}, the free group generated by F surjects onto the group G. The kernel of this map is called the subgroup of relations, generated by some subset D. The presentation is usually denoted by {\displaystyle \langle F\mid D\rangle .} For example, the group presentation {\displaystyle \langle a,b\mid aba^{-1}b^{-1}\rangle } describes a group which is isomorphic to {\displaystyle \mathbb {Z} \times \mathbb {Z} .} A string consisting of generator symbols and their inverses is called a word.




Combinatorial group theory studies groups from the perspective of generators and relations.[6] It is particularly useful where finiteness assumptions are satisfied, for example finitely generated groups, or finitely presented groups (i.e. in addition the relations are finite). The area makes use of the connection of graphs via their fundamental groups. For example, one can show that every subgroup of a free group is free.
There are several natural questions arising from giving a group by its presentation. The word problem asks whether two words are effectively the same group element. By relating the problem to Turing machines, one can show that there is in general no algorithm solving this task. Another, generally harder, algorithmically insoluble problem is the group isomorphism problem, which asks whether two groups given by different presentations are actually isomorphic. For example, the group with presentation {\displaystyle \langle x,y\mid xyxyx=e\rangle ,} is isomorphic to the additive group Z of integers, although this may not be immediately apparent.[7]

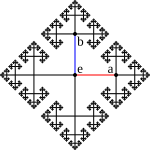
The Cayley graph of ⟨ x, y ∣ ⟩, the free group of rank 2.
Geometric group theory attacks these problems from a geometric viewpoint, either by viewing groups as geometric objects, or by finding suitable geometric objects a group acts on.[8] The first idea is made precise by means of the Cayley graph, whose vertices correspond to group elements and edges correspond to right multiplication in the group. Given two elements, one constructs the word metric given by the length of the minimal path between the elements. A theorem of Milnor and Svarc then says that given a group G acting in a reasonable manner on a metric space X, for example a compact manifold, then G is quasi-isometric (i.e. looks similar from a distance) to the space X.
Helpful info. Lucky me I discovered your website accidentally, and I am surprised why this twist of fate did not came about earlier! I bookmarked it.