According to George Klir his taxonomy of systems is intended to provide a pragmatically founded classification useful within various disciplines and engineering modes. It was first presented in his book Architecture of Systems Problem Solving in 1985. The empirical application demonstrated in this work, the General Systems Problem Solver, GSPS, is a computer- based expert system.
Klir’s conceptual framework builds upon strictly mathematical definitions (not presented here) and demands some experience in formal thinking to be wholly understood. Before defining a system as such, he identifies the system traits. These are compiled from the inherent variables (behaviour, states, etc.) and thereafter classified and formalized. If any of the primary traits participating in the definition change, the system also changes. The pertinent hierarchy consists of at least five fundamental levels of systems based on the following essential perspectives: that of an investigator and his environment, an investigated object and its environment, and an interaction between the investigator and his object. Each level embodies and supplements all lower levels.
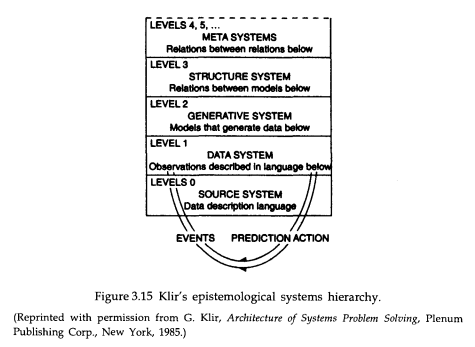
Level zero, also called source system is determined by the way an investigator interacts with the investigated object. This interaction is partially guided by the preferences of the investigator but should include the following aspects: definition of a set of variables, a set of potential states for each variable and a description of the meaning of the variables with their states (real world attributes and manifestations). The variables must be partitioned as either basic or supporting.
Basic variables can be either input or output variables and belong to directed systems. Systems without basic variables are called neutral systems. All supporting variables together form a support set wherein changes in the state of the basic variables take place. Examples of often-used supporting variables are space, time and aggregations of entities of the same kind (products, peoples, etc.). As the name zero level implies, it is a source of empirical data concerning the attributes of the object in focus.
Level one supplements the source system of level zero with data regarding the variables which are therefore called data systems. This level comprises all knowledge contained in level zero plus additional knowledge now available. Data is gained from measurement or observations or from the definition of desirable states.
Level two (and all higher levels) possesses knowledge of support- invariant relational characteristics of inherent data generating variables for boundary conditions. Invariance implies that however the support set may change, certain features defining the function of the data set remain invariant to such changes. The support-invariant relation describes a process generating states of the basic variables of the support set. The level is thus one of generative systems.
Level three belongs to structure systems and is defined in terms of a set of generative systems, also called subsystems of the total system. The subsystems share different variables and interact in various ways.
Level four is described as metasystems and consists of a set of systems defined at levels 1, 2 or 3 and a support-invariant metacharacterization. Lower level systems must share the same source system.
Level five defines meta-metasystems. Here, the metacharacterization is allowed to change within the support set according to supportinvariant representation. Metasystems of higher order are defined in the same way.
A simplified overview of this epistemological hierarchy is shown in Figure 3.15.
Klir states that a system, a requirement or a problem is identifiable if it can be formulated in terms of his systems hierarchy of GSPS language. It is admissible if both identifiable and able to be handled in terms of a certain GSPS application. It is solvable if admissible and can be solved using the methodological tools available in a GSPS implementation.
The computer system built on Klir’s conceptual framework enables the user to deal with systems problems. Figure 3.16 shows its four functional units: a control unit, a metamethodological support unit, a knowledge base and a set of methodological tools.
Methodological tools are methods having programs designed to solve admissible problems. Certain procedures specify the order in which individual algorithms are used. The metamethodological support unit contains information indicating how to order the problems according to how general they are. Information concerning problems which cannot be solved by the system is stored in the knowledge base unit. This unit also contains useful information regarding different kinds of system and systems problems, as well as relevant laws and rules of thumb. A user interface works either through the conceptual framework or via a direct connection to the main unit. While the conceptual framework is used in the formulation of problems, the direct connection is used for metamethodological considerations and consultations from the database.
While Klir’s classification can be adequate for well-structured situations, it is less adequate for social problems with their indistinct and unmeasurable nature.

Figure 3.16 A block diagram of the GSPS architecture.
(Reprinted with permission from G. Klir, Architecture of Systems Problem Solving, Plenum Publishing Corp., New York, 1985.)
Source: Skyttner Lars (2006), General Systems Theory: Problems, Perspectives, Practice, Wspc, 2nd Edition.